Season Reflection: What We Learned Beyond the Robot
It’s been a really fun season. With everything going on (sports, school, other activities), it’s gotten harder to give the Robotics OmniTech team the time[…]
Why S-Bot?
We chose the S-Bot design because it offers significantly higher efficiency and has a proven, reliable track record throughout the season across many competitive teams.[…]
Robot Dissasembly and Design/Build Start
During winter break recently, we have worked to fully disassemble the old V3 robot. In parallel, we have been working to design and figure out[…]

Competition and Learnings
Our competition at UC Berkely was an amazing experience, despite our shortcomings. We met many impressive teams, who came from far and wide around the[…]

Funnel Fixes
We changed the intake funnel to more efficiently and clearly intake. In the last competition, and while practicing on our field, we realized that the[…]

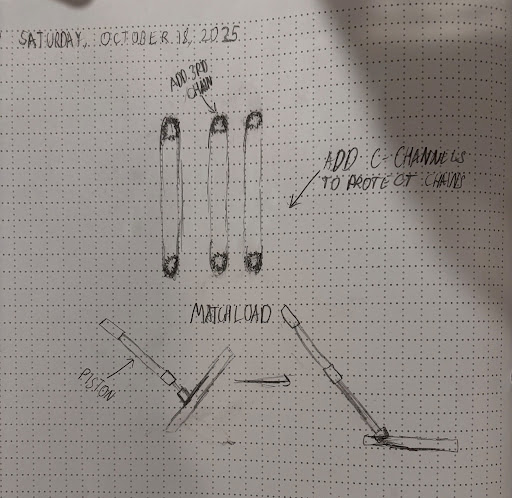
Chain Protection
We moved the chain to prevent the chains snapping when other robots hit our robot, which we noticed happened often during the last competition.
Intake Improvements
We decreased the number of intake rollers, because the initial high quantity caused intake jamming, and the new design allows for quicker and smoother intake.
Functioning Matchload
We finished building the matchload, and again, we created new ideas along the way for it, and it works well.
Matchload Initiation
We started building the matchload, and we did create new ideas along the way for it, and although we didn’t finish building it, we did[…]
Post Competion Planning
We just had our second tournament, and we realized that matchloads are really important! This is because not all our teammates had them, which gave[…]