During winter break recently, we have worked to fully disassemble the old V3 robot. In parallel, we have been working to design and figure out how our S-bot, which we have named “In-S-Omni-A”, will work.
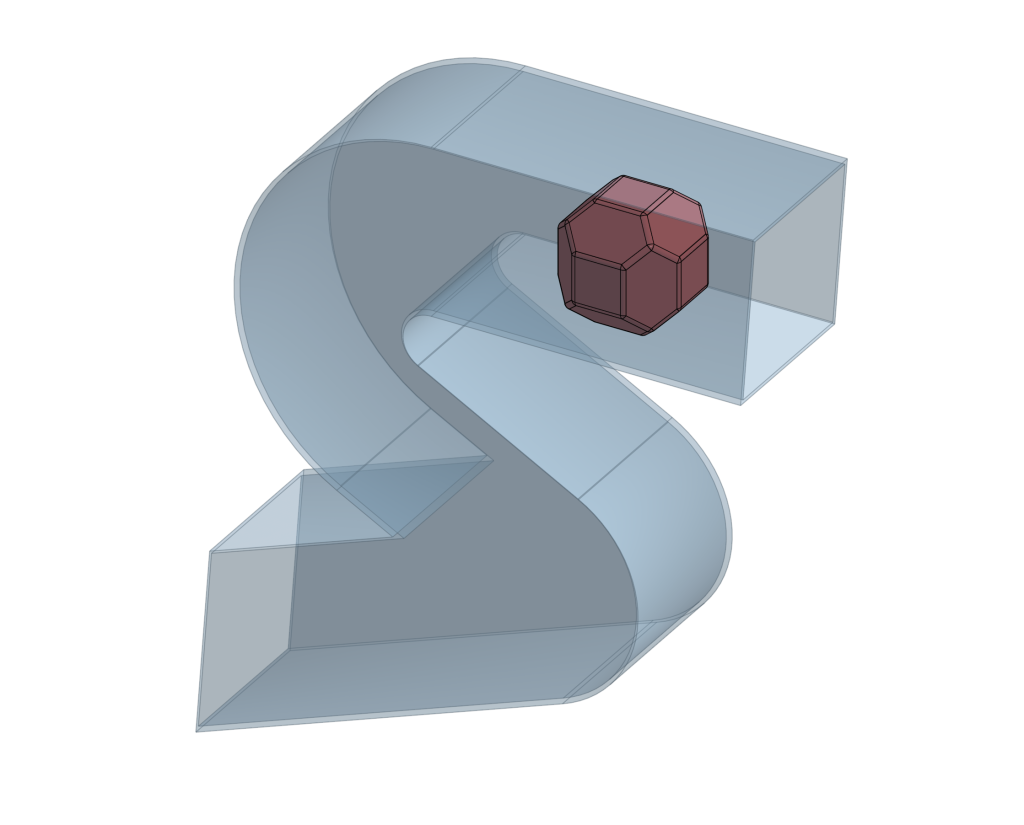
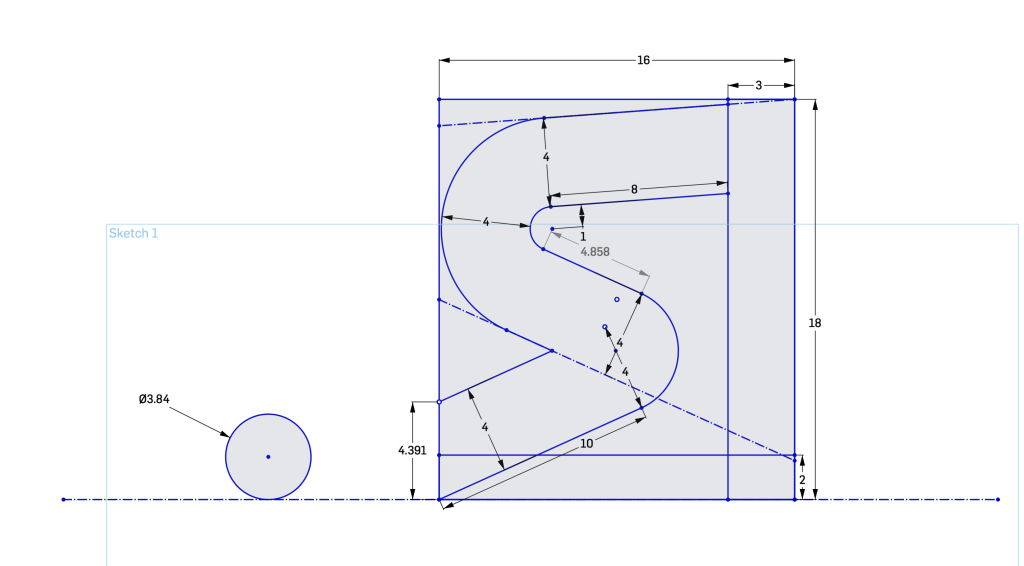
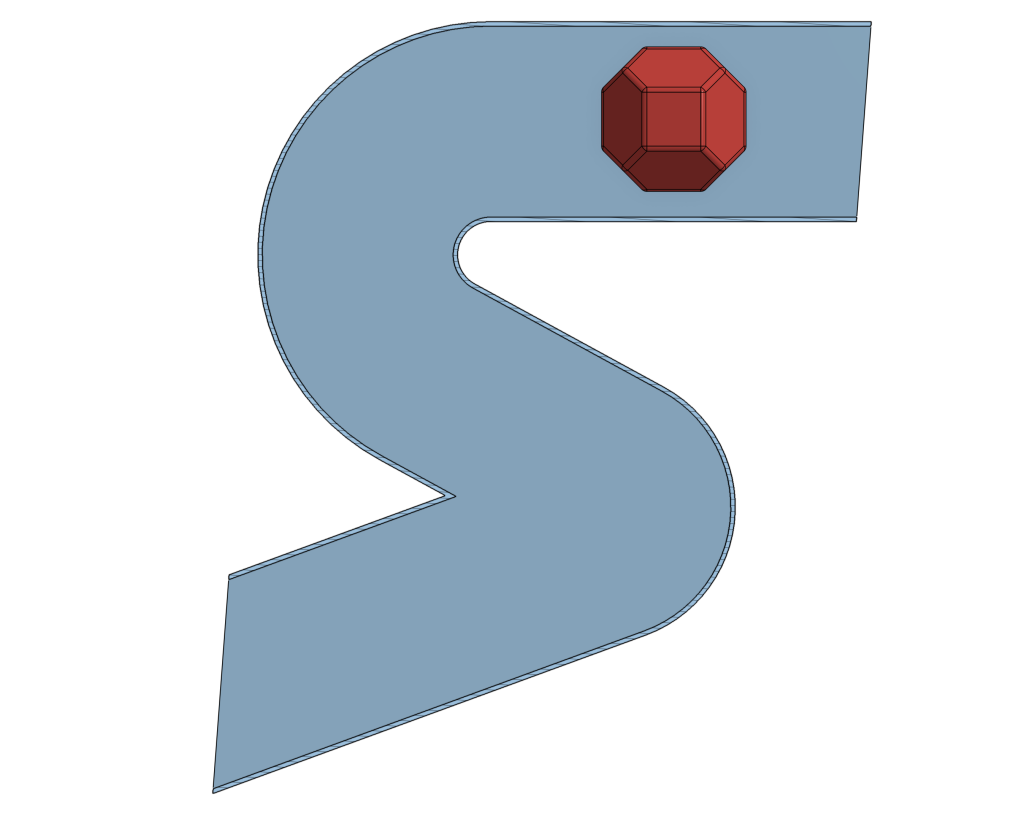
Pictured below are some rough estimations on the dimensions and design of the robots main S-section:
No responses yet